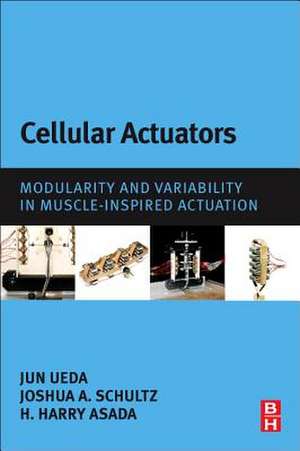
Cellular Actuators: Modularity and Variability in Muscle-inspired Actuation
Autor Jun Ueda, Joshua A Schultz, Harry Asadaen Limba Engleză Paperback – 25 ian 2017
Piezoelectric actuators, the topic of this book, provide advantages like displacement scale, force, reliability, and compactness, and rely on material properties to provide displacement and force as reactions to electric stimulation. The authors, renowned researchers in the area, present the fundamentals of muscle-like movement and a system-wide study that includes the design, analysis, and control of biologically inspired actuators. This book is the perfect guide for researchers and practitioners who would like to deploy this technology into their research and products.
- Introduces Piezoelectric Actuators concepts in a system wide integrated approach
- Acts as a single source for the design, analysis, and control of actuator arrays
- Presents applications to illustrate concepts and the potential of the technology
- Details the physical assembly possibilities of Piezo actuators
- Presents fundamentals of bio inspired actuation
- Introduces the concept of cellular actuators
Preț: 761.20 lei
Preț vechi: 1133.57 lei
-33% Nou
Puncte Express: 1142
Preț estimativ în valută:
145.68€ • 151.52$ • 120.26£
145.68€ • 151.52$ • 120.26£
Carte tipărită la comandă
Livrare economică 07-21 aprilie
Preluare comenzi: 021 569.72.76
Specificații
ISBN-13: 9780128036877
ISBN-10: 0128036877
Pagini: 382
Dimensiuni: 152 x 229 x 35 mm
Greutate: 0.6 kg
Editura: ELSEVIER SCIENCE
ISBN-10: 0128036877
Pagini: 382
Dimensiuni: 152 x 229 x 35 mm
Greutate: 0.6 kg
Editura: ELSEVIER SCIENCE
V-ar putea interesa
-
 -5%Preț: 671.43 lei706.78 lei
-5%Preț: 671.43 lei706.78 lei -
 -20%Preț: 546.34 lei682.92 lei
-20%Preț: 546.34 lei682.92 lei -
 Fractals in Engineering: From Theory to Industrial ApplicationsJacques Levy Vehel-20%Preț: 651.75 lei814.68 lei
Fractals in Engineering: From Theory to Industrial ApplicationsJacques Levy Vehel-20%Preț: 651.75 lei814.68 lei -
 -20%Preț: 332.06 lei415.08 lei
-20%Preț: 332.06 lei415.08 lei -
 -20%Preț: 646.62 lei808.28 lei
-20%Preț: 646.62 lei808.28 lei -
 -20%Preț: 161.90 lei202.38 lei
-20%Preț: 161.90 lei202.38 lei -
 Propagation Phenomena in Real World NetworksDariusz Król-20%Preț: 649.75 lei812.19 lei
Propagation Phenomena in Real World NetworksDariusz Król-20%Preț: 649.75 lei812.19 lei -
 -20%Preț: 343.95 lei429.93 lei
-20%Preț: 343.95 lei429.93 lei -
 -20%Preț: 347.91 lei434.89 lei
-20%Preț: 347.91 lei434.89 lei -
 -20%Preț: 330.75 lei413.44 lei
-20%Preț: 330.75 lei413.44 lei -
 -20%Preț: 334.05 lei417.56 lei
-20%Preț: 334.05 lei417.56 lei -
 -20%Preț: 1298.00 lei1622.50 lei
-20%Preț: 1298.00 lei1622.50 lei -
 -20%Preț: 339.80 lei424.75 lei
-20%Preț: 339.80 lei424.75 lei -
 -20%Preț: 1303.45 lei1629.32 lei
-20%Preț: 1303.45 lei1629.32 lei -
 -20%Preț: 424.71 lei530.89 lei
-20%Preț: 424.71 lei530.89 lei -
 -20%Preț: 424.05 lei530.07 lei
-20%Preț: 424.05 lei530.07 lei -
 Neuronale Netze: Optimierung durch Lernen und EvolutionHeinrich Braun-20%Preț: 360.85 lei451.07 lei
Neuronale Netze: Optimierung durch Lernen und EvolutionHeinrich Braun-20%Preț: 360.85 lei451.07 lei -
 Time, Mind, and BehaviorJohn A. Michon-20%Preț: 333.88 lei417.34 lei
Time, Mind, and BehaviorJohn A. Michon-20%Preț: 333.88 lei417.34 lei -
 Artificial Intelligence in Design ’96John S. Gero-20%Preț: 357.15 lei446.44 lei
Artificial Intelligence in Design ’96John S. Gero-20%Preț: 357.15 lei446.44 lei -
 Automated Mathematical InductionHantao Zhang-20%Preț: 642.33 lei802.90 lei
Automated Mathematical InductionHantao Zhang-20%Preț: 642.33 lei802.90 lei -
 Resolution Proof Systems: An Algebraic TheoryZ. Stachniak-20%Preț: 642.19 lei802.74 lei
Resolution Proof Systems: An Algebraic TheoryZ. Stachniak-20%Preț: 642.19 lei802.74 lei
Public țintă
Researchers and engineers in this field. The book could be used as graduate-level introductory class (as mentioned by reviewers).Cuprins
1. Introduction2. Structure3. Modeling4. Control5. Applications6. Conclusions